قام باحثون بتطوير نهج هندسي جديد يمكّن من التحكم في حركة روبوتات بيولوجية مصنوعة من خلايا الرئة البشرية. هذه الروبوتات الحية المجهرية قد تتمكن في المستقبل من التنقل عبر بيئات الجسم المعقدة لتقديم التدخلات العلاجية أو الميكانيكية المطلوبة.
أجرى هذه الدراسة باحثون من مختبر الدكتور شي رين بجامعة كارنيجي ميلون في الولايات المتحدة، ونُشرت نتائجها في مجلة ساينس أدفانسز في 26 سبتمبر/أيلول الجاري، وقد كتب عنها موقع يوريك أليرت.
تعتبر الروبوتات البيولوجية آلات بيولوجية مجهرية من صنع الإنسان، قادرة على الحركة الذاتية ويمكن برمجتها لأداء مهام أو سلوكيات محددة. في السابق، كان تمكين الروبوتات البيولوجية من الحركة يعتمد على استخدام ألياف العضلات التي تسمح لها بالحركة من خلال الانقباض والانبساط كما هو الحال في العضلات الحقيقية.
الحركة باستخدام الأهداب
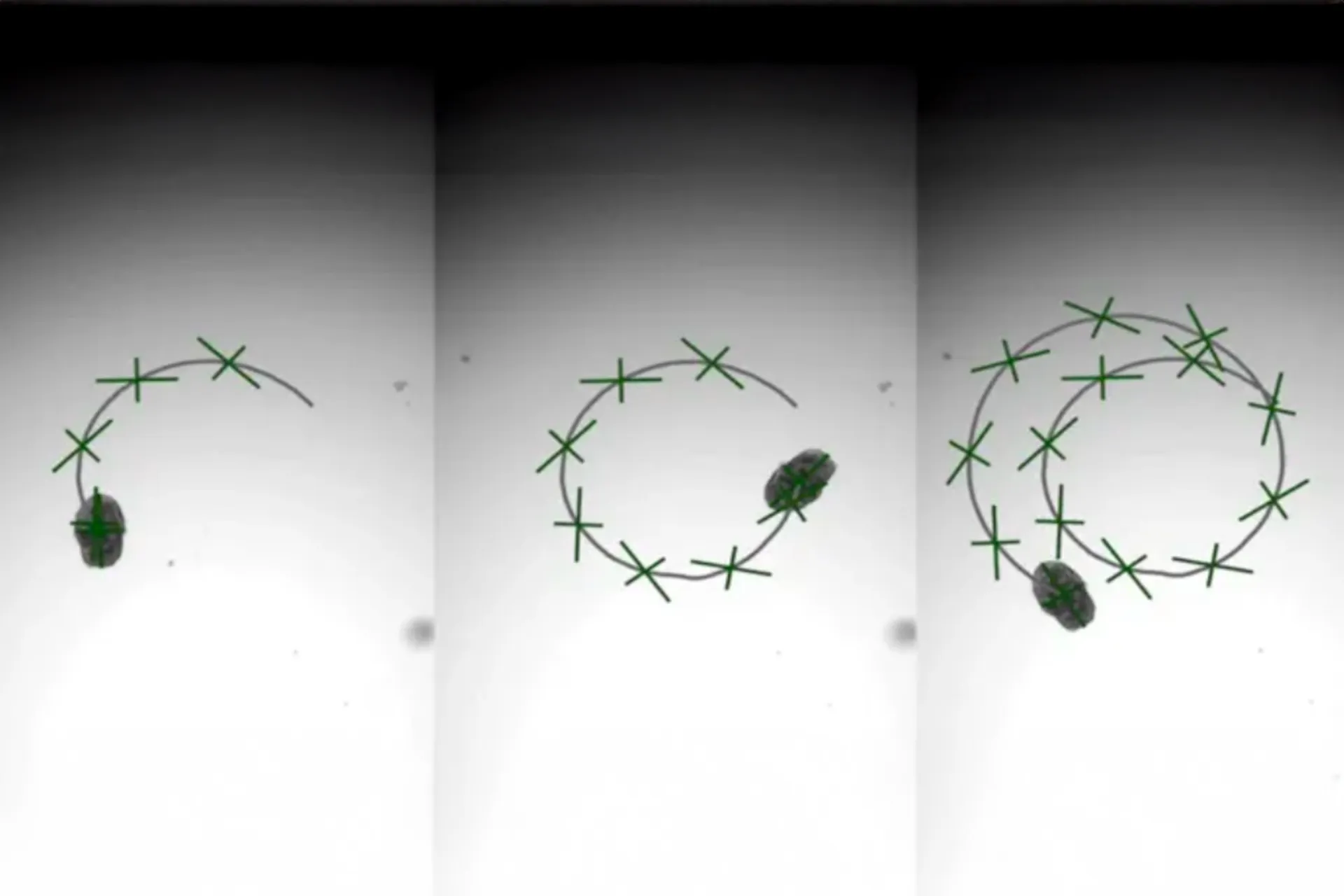
يمكن إيجاد آلية تشغيل بديلة ومبتكرة باستخدام الأهداب، وهي مراوح عضوية نانوية تشبه الشعر، تحرك السوائل باستمرار في الجسم، كما يحدث في الرئتين. ومع ذلك، كان التحكم الدقيق في شكل وحركة هذه الروبوتات تحديًا كبيرًا.
ابتكر مختبر رين استراتيجية تجميع معيارية جديدة لتصنيع الروبوتات المهدبة، من خلال التجميع المكاني المنضبط للكرات النسيجية التي يقوم مهندسو المختبر بإنشائها من الخلايا الجذعية للرئة، والتي تعرف باسم "أغري بوتس" (AggreBots).
يمكن لهذه الروبوتات المجمّعة أن تتضمن كرات نسيجية من الخلايا الجذعية تحمل طفرة جينية تعطل حركة الأهداب في مناطق محددة، مما يسمح بالتحكم في حركتها بشكل دقيق.
تعد هذه التقنية مفيدة لمجموعة واسعة من الباحثين، بما في ذلك الباحثين في مجال الروبوتات الحيوية، والأطباء، والباحثين الطبيين الذين يدرسون كيفية عمل الأهداب في بعض الأمراض.









